
Description
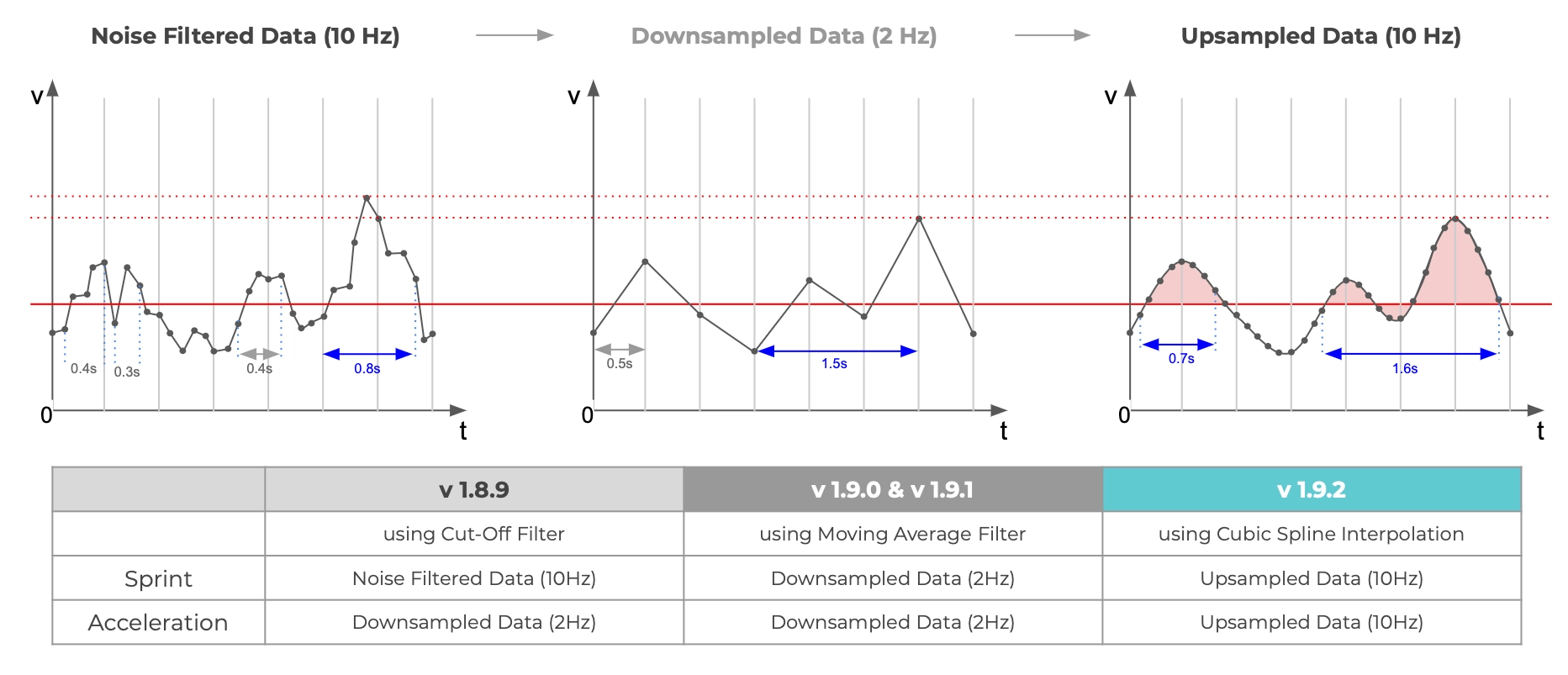
가공되지 않은 GPS tuple 중에는 noise가 존재하며, 분석에 그대로 사용하면 오차를 발생시킬 수 있다. 따라서 해당 데이터를 먼저 2Hz로 down-sampling한 뒤(5개씩 평균 계산) 10Hz로 다시 up-sampling하여(cubic spline interpolation) noise가 적은 부드러운 데이터로 만든다. 그 결과를 smooth GPS tuple이라 하며, 해당 tuple의 위치 및 속력을 분석에 사용한다.
Formal Definition
Before the analysis, we smooth the raw GPS data through the following two steps for noise reduction.
1. Average Down-Sampling
We down-sample the time-series of GPS tuples by averaging every consecutive tuples. The down-sampling results in the time-series such that
2. Cubic Spline Interpolation
We up-sample to a time-series per such that by applying the cubic spline interpolation.
In other words, we define the spline for each satisfying
•
(i.e., is twice continuously differentiable on .)
•
On each subinterval , is an -valued polynomial of degree 3.
•
.
and define the smooth GPS tuples as
on .
Parameter Setting
•
[1.8.3] , , and
(No down-sampling or up-sampling.)
•
[1.9.0] and
(Raw GPS data are down-sampled by 2 Hz without additional up-sampling.)
•
[1.9.2] and
(Raw GPS data are smoothed by consecutive 2 Hz down-sampling and 10 Hz up-sampling.)